GNSS (Global Navigation Satellite System)
GNSSによる測位高精度化に関する様々な研究を行っています。
機械学習を用いたマルチパス検出
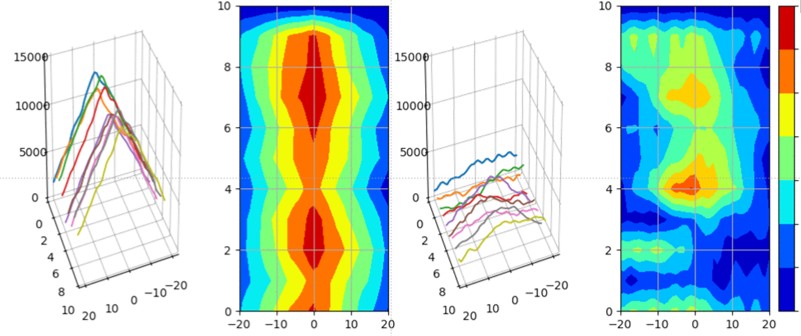
ソフトウェアGNSS受信機を用いたNN (Nural Network) / CNN (Convolutional Nural Network) によるマルチパス検出
- Taro Suzuki, NLOS multipath classification of GNSS signal correlation output using machine learning, Sensors, 2021
- Taro Suzuki, NLOS multipath detection using convolutional neural network,ION GNSS+2020, 2020
都市環境のGNSS高精度化

Particle Filterを用いた高精度測位アルゴリズム
- Taro Suzuki, Multiple update particle filter: Position estimation by combining gnss pseudorange and carrier phase observations, ICRA2024, 2024
GNSSとIMU (Inertial Mesurement Unit) の新しい複合方法
- Taro Suzuki, Attitude-estimation-free GNSS and IMU integration, IEEE RA-L, 2024
回転GNSSアンテナによるマルチパス低減・高精度化の研究
- Taro Suzuki, Rotating GNSS antennas: Simultaneous LOS and NLOS multipath mitigation, GPS Solutions, 2020
スマートフォン高精度測位
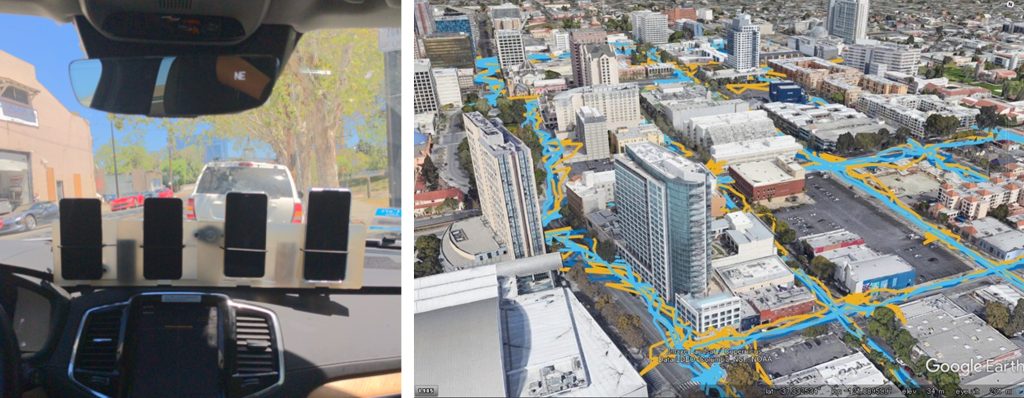
スマートフォン搭載のGNSSによる高精度測位の研究
- Google Smartphone Decimeter Challengeへの挑戦
- Taro Suzuki, Precise position estimation using smartphone raw GNSS data based on two-step optimization, Sensors, 2023
- Taro Suzuki, An open-source factor graph optimization package for gnss and imu integration in smartphones, ION GNSS+2024, 2024
移動ロボット
ドローン、建設機械の自動化、四脚ロボットのナビゲーション、3DマッピングシステムなどGNSSの様々な応用研究を行っています。
ドローンの高精度位置姿勢推定と3Dマッピング
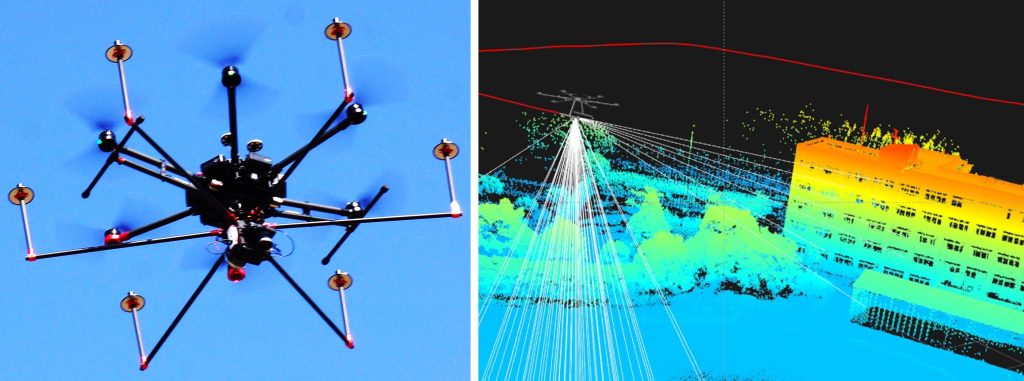
ドローンに複数のGNSSアンテナ・受信機を搭載し、GNSSからドローンの位置と姿勢を高精度に推定、搭載Lidarによる3Dマッピング
- Taro Suzuki, Robust UAV position and attitude estimation using multiple GNSS receivers for laser-based 3D mapping, IROS 2019
大型ダンプトラックの自動運転

ダンプトラックに搭載した複数のGNSSからダンプトラックの位置・姿勢・アーティキュレート角などの状態推定
- Taro Suzuki, Estimation of articulated angle in six-wheeled dump trucks using multiple GNSS receivers for autonomous driving, Advanced Robotics, 2021
準天頂衛星 (QZSS) のCLAS (センチメータ級測位補強サービス) を利用したダンプトラックの自動運転
- Taro Suzuki, Automatic Operation of an Articulated Dump Truck: State Estimation by Combined QZSS CLAS and Moving-Base RTK Using Multiple GNSS Receivers, ION Pacific PNT, 2024
四脚ロボットの自律ナビゲーション
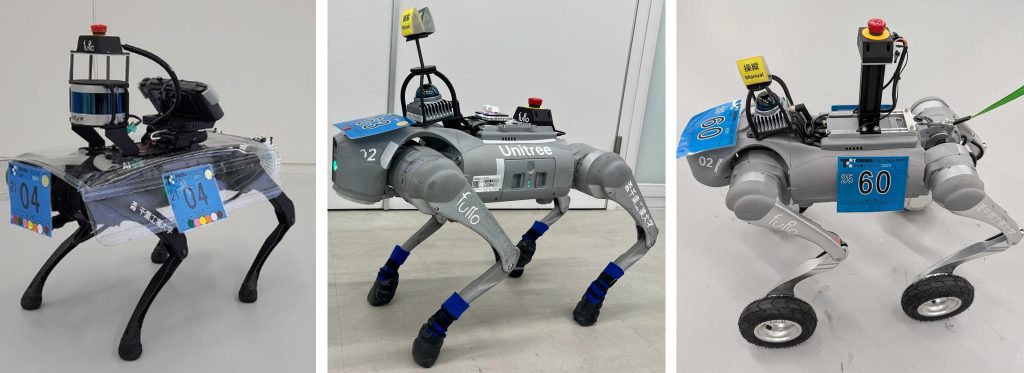
つくばチャレンジ/ Quadruped Robot Challenges での四脚ロボットの自律ナビゲーション
- Kiyoshi Irie, Taro Suzuki, Rough terrain navigation for a quadruped robot using deep reinforcement learning-based blind locomotion control and a stuck-escape strategy, Advanced Robotics, 2025
3Dマッピングシステム
GNSS/IMU/Lidar/カメラ統合による3Dマッピングシステムの構築
- Jin Akiyama, Taro Suzuki, High-resolution point cloud registration method for three-dimensional piping measurements, JRM, 2023